Oktober 2020
Nieuwe rekenmodellen verhogen betrouwbaarheid simulaties pv-systemen

Bij het ontwerpen en simuleren van pv-systemen is het belangrijk om zo goed mogelijk de opbrengst te kunnen voorspellen. Deze bepaalt immers de terugverdientijd en de eventuele haalbaarheid van de systemen in een specifieke omgeving. Omdat de huidige simulatiemethoden onvoldoende rekening houden met schaduweffecten van de omgeving – vooral in stedelijke gebieden – onderzocht ir. Marc Tavenier aan de tu/e bij Building Physics and Services, twee nieuwe rekenmodellen. Daarbij legde hij niet alleen een focus op een betere nauwkeurigheid, maar tevens op de praktische toepasbaarheid en bijbehorende kosten.
De noodzaak van pv-systemen in het kader van de energietransitie zal weinig mensen zijn ontgaan. Voordat echter de beslissing wordt genomen om een pv-systeem te realiseren, is het belangrijk om vooraf te bepalen of een specifieke locatie voldoende geschikt is. Hierbij wordt gebruikgemaakt van simulatieprogramma’s die, op basis van onder meer oriëntatie en statistieken met betrekking tot de zoninstraling, de opbrengst van deze systemen berekenen. Een deel van de simulatieprogramma’s houdt rekening met schaduweffecten van objecten die in de omgeving van het beoogde systeem staan, zoals begroeiing of andere bouwwerken. Een ander deel van de simulatieprogramma’s doet dit niet, waardoor over het algemeen is te zeggen dat uitkomsten van de berekeningen onvoldoende nauwkeurig zijn wanneer deze belemmeringen inderdaad aanwezig zijn. De nauwkeurigheid wordt nog verder negatief beïnvloed omdat de omgevingsfactoren niet de enige onzekerheid zijn. Ook de temperatuur van de panelen beïnvloedt de opbrengst, evenals de technische eigenschappen van de panelen zelf, de bekabeling en andere componenten, zoals de omvormer. Daarnaast worden ook steeds meer alternatieve pv-systemen ontwikkeld die het voorspellen van de opbrengst bemoeilijken. In plaats van panelen op het dak of een veld worden bijvoorbeeld folies op ramen of andere oppervlakken aangebracht die zonlicht omzetten in elektriciteit. Of er wordt gebruikgemaakt van energieopwekkende gevelpanelen. En zo zijn er nog meer voorbeelden te noemen. Van deze nieuwe systemen is nog lang niet altijd goed bekend hoe de prestaties variëren met specifieke omgevingsomstandigheden. Marc Tavenier: ‘Door al deze onzekerheden is het lastig om de opbrengsten van pv-systemen betrouwbaar te voorspellen. Dat is een gemis want dit wordt juist steeds belangrijker. Projectbureaus willen vooraf bijvoorbeeld kunnen aantonen dat een beoogd systeem in voldoende mate bijdraagt aam de beng- of nzeb-eisen. Om die reden heb ik mijn afstudeerproject gericht op het ontwikkelen van nieuwe rekenmethoden die nauwkeuriger in staat zijn om de invloed van de omgevingsfactoren op de prestaties van pv-panelen te bepalen. Vooral in dicht bebouwde omgevingen, zoals deze voorkomen in stedelijke gebieden.’
 1. Opnameapparatuur en eindresultaat van een afbeelding in het kader van de skyline methode (bron: A. Calcabrini, H. Ziar, O. Isabella en M. Zeman).
1. Opnameapparatuur en eindresultaat van een afbeelding in het kader van de skyline methode (bron: A. Calcabrini, H. Ziar, O. Isabella en M. Zeman).
Huidige oplossingen
Op dit moment bestaat er een tweetal benaderingen die het hoogteprofiel van de omgeving meenemen in pv-simulaties zonder dat deze handmatig gemodelleerd moet worden. De eerste gaat uit van de skyline, de tweede van een zogeheten digitaal oppervlaktemodel (digital surface model of dsm). Bij de skyline-benadering wordt gebruikgemaakt van apparatuur die vanaf de plek van het pv-systeem een breedhoek-opname maakt van de omgeving. Hiermee worden de objecten vastgelegd die hun schaduw werpen op het pv-paneel. Op deze manier wordt een 2D-beeld gemaakt van een 3D-omgeving en is een inschatting te maken van de hoeveelheid straling die het paneel uiteindelijk bereikt. Daarnaast wordt gebruikgemaakt van de Sky View Factor (svf); een factor die weergeeft hoe ‘open’ de hemelkoepel voor een specifiek punt is. 0 betekent dat alles geblokkeerd is terwijl 1 staat voor een volledig open omgeving. Deze factor wordt breed toegepast in verschillende rekenmethoden [1, 2, 3]. Bij de tweede benadering, gebaseerd op dsm, wordt een rasterafbeelding gemaakt waarbij de waarde van elk individueel punt correspondeert met hoogtemetingen. Deze afbeelding wordt gecreëerd door Light Detection And Ranging (Lidar) data te combineren met gps. Met de Delaunay-triangulatie wordt deze afbeelding vervolgens omgezet in een 3D-model dat de omgeving weergeeft. Dit is uiteindelijk de basis om met weerstatistieken te berekenen hoeveel zonlicht jaarlijks elk punt zal bereiken. Hoewel een 3D-benadering het voordeel heeft dat ‘raytracing’-simulaties zijn te implementeren, ontstaan bij deze methode ook nadelige neveneffecten (afbeelding 3). De belangrijkste is het feit dat de verticale wanden geribbeld worden gemodelleerd wat invloed zou kunnen hebben op de reflectiecomponent van de instraling. De nauwkeurigheid is wel te verbeteren door data uit extra bronnen te combineren, maar doel van het onderzoek is om de methoden eenvoudig te houden waarmee gebruikmaken van een enkele databron de voorkeur heeft. In beide gevallen wordt vervolgens een softwarepakket gebruikt om de modellen door te rekenen en hiermee de opbrengst van een pv-systeem te schatten. Tavenier: ‘Beide benaderingen hebben op dit moment hun beperkingen. Bij de skyline-methode is dit vooral het feit dat je fysieke metingen moet doen vanaf het punt waar zich het pv-systeem gaat bevinden. De apparatuur is financieel gezien lang niet voor iedereen toegankelijk, het kost veel tijd om de metingen te doen én soms is het ook niet mogelijk de metingen uit te voeren, bijvoorbeeld wanneer een gebouw nog niet bestaat. De dsm-methode is vooral problematisch omdat een groot aantal databronnen moet worden samengevoegd, de Lidar-data opgeschoond en het proces om alle gegevens door te rekenen – vanwege de complexiteit – langdurig is. Daarbij gaat het hier vaak om beschermde software die lang niet altijd in bestaande simulatiesoftware is te integreren.’
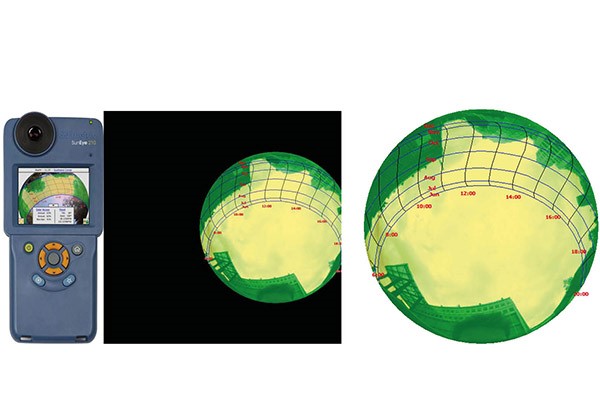 2. Solmetric SunEye-apparatuur waarmee uiteindelijk het groengele beeld is te maken waarbij groen schaduw betekent en geel het zonnepad beschrijft (bron: Solemetric).
2. Solmetric SunEye-apparatuur waarmee uiteindelijk het groengele beeld is te maken waarbij groen schaduw betekent en geel het zonnepad beschrijft (bron: Solemetric).
Nieuwe rekenmodellen
Bovenstaande conclusie was voor Tavenier aanleiding om zijn onderzoek te richten op het ontwikkelen van een eenvoudige en nauwkeurige methode die de effecten van stedelijke omgevingen (schaduw en reflectie) meeneemt bij het simulerenvan de opbrengst van pv-panelen. Met eenvoudig doelt hij op de beschikbaarheid en bereikbaarheid van de gegevens (vooral Lidar of dsm) waarmee het vereiste 2D- of 3D-model is te creëren. Hierbij gebruikmakend van gratis, opensource-software die het mogelijk maakt een koppeling te maken met bestaande simulatieprogramma’s. ‘Nauwkeurig’ refereert aan een model dat kan worden gevalideerd door bestaande methoden en metingen. Bovendien is het belangrijk dat de voorgestelde werkwijze automatiseerbaar is waardoor de verschillende rekenprocessen niet al te veel tijd in beslag nemen en de methode schaalbaar is. Tavenier: ‘In mijn onderzoek combineer ik hiervoor de voordelen van de Skyline- en dsm-methode waarbij ik de beperkingen grotendeels elimineer. Dit leidde tot twee modellen waarin ik 3D-informatie gebruik om een 2D-model - snel - te kunnen doorrekenen. De twee voorgestelde methoden worden getoetst aan enerzijds de ‘state-of-the-art’ methoden en aan echte metingen.’
Onderzoeksmethode
De twee modellen die Tavenier noemt betreffen een staafmodel en een pixelmodel. Het eerste model is een manier om dsm-gebaseerde puntwolken om te zetten naar een schaduwgeometrie door deze punten op het skyline profiel te projecteren. Vervolgens worden zij omgezet naar een staafachtige geometrie die tot de horizon reikt. Dit veronderstelt dat de alle punten in de wolk direct verbonden zijn met de grond onder hen, waarmee sneller en eenvoudiger is te rekenen terwijl het even nauwkeurig is als het trianguleren van de omgeving. Het pixelmodel stapt af van de aanname van het staafmodel dat alle punten met de grond zijn verbonden. Door gebruik te maken van machine learning is dit model in staat om elk punt in de hemelkoepel te classificeren als ‘lucht’ of ‘schaduw’. Om de kwaliteit van de twee voorgestelde modellen te onderzoeken, creëerde Tavenier twee validatiemodellen. De eerste is gebaseerd op de huidige beschikbare methoden die gebruikmaken van Delaunay triangulatie gebaseerd op puntwolkextractie van een Lidar gebaseerde dsm. Het tweede model maakt gebruik van het zogeheten Solmetric SunEye 210-meetapparaat waarmee een schaduwmodel wordt gemaakt op basis van de gemeten skyline. Dit model verifieert de vorm van de schaduwmodellen in zowel het staaf- als het pixelmodel (afbeelding 5). De analyse van de modellen gebeurt door gebruik te maken van Daysim-instralingssimulatie met tijdstappen van een uur in combinatie met de casestudie: het centrum van Eindhoven. De analyse bestaat uit een experimentele validatie en kruisvergelijking van de modellen op elf plaatsen in de stad. De experimentele validatie zal het schaduwmodel van de twee voorstelde modellen vergelijken met de SunEye-beelden terwijl de kruisvergelijking de simulatie van de instraling zal analyseren op basis van de eerdergenoemde ‘eisen’ met betrekking tot eenvoud, nauwkeurigheid en automatiseerbaarheid (afbeelding 6).
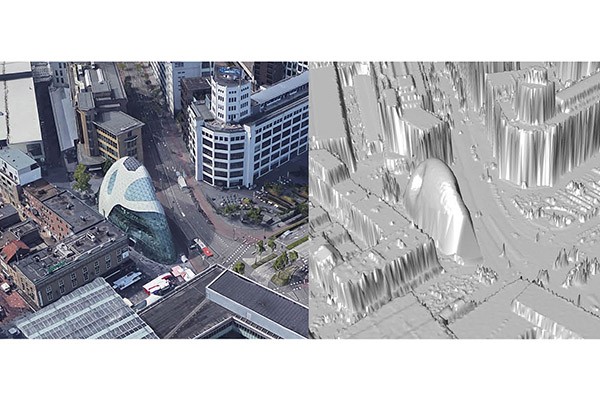 3. Een omgeving gezien (links) omgezet in een digitaal 3D-model (rechts) (bron linkerfoto: Google Maps, 23 december 2019).
3. Een omgeving gezien (links) omgezet in een digitaal 3D-model (rechts) (bron linkerfoto: Google Maps, 23 december 2019).
Staafmodel wint
Op basis van het onderzoek heeft Tavenier de volgende conclusies kunnen trekken waarbij de onderzoeksresultaten steeds betrokken zijn op de zojuist herhaalde drie eisen. Wat betreft de nauwkeurigheid leert het onderzoek dat het cilindrische schaduwmodel als basis voor het staafmodel significant beter presteert dan een conventioneel hemisferisch schaduwmodel. Het staafmodel presteert verder beter dan het pixelmodel in vergelijking met het triangulatie-validatiemodel en het op meetgegevens gebaseerde validatiemodel. De zogeheten root-mean-squared error (rmse, het verschil tussen de geschatte en werkelijke waarde) bedraagt respectievelijk 63,1 en 202,3 Wh/m2 terwijl de deviatie uitkomt op respectievelijk 0,04 en 3,08 procent. Verder blijkt dat het pixelmodel uiteindelijk te veel classificatiefouten produceert ten opzichte van de voordelen die het heeft ten opzichte van het staafmodel. Wat betreft de eenvoud van het gebruik bleek het staafmodel eveneens te winnen omdat het onder meer gebruik maakt van vrij beschikbare Lidar data (in Nederland bekend als de ahn3) en opensource scripts die speciaal voor dit afstudeerproject zijn geschreven. Daarbij rekende het tot zeven keer sneller door dan de triangulatie-methode met betrekking tot pre-, post-processing en simulatietijd.
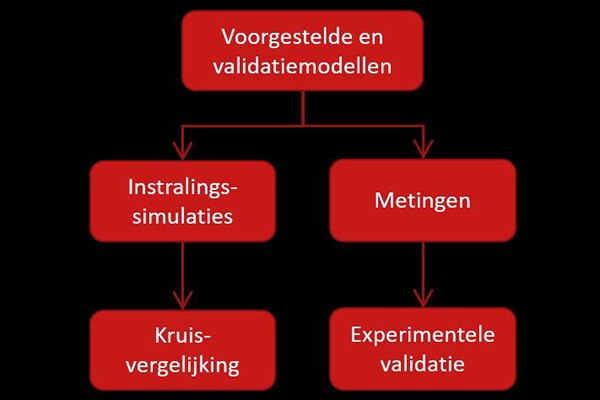 5. Flowchart van het onderzoek van ir. Marc Tavenier.
5. Flowchart van het onderzoek van ir. Marc Tavenier.
Discussie
Natuurlijk zijn er ook in dit onderzoek discussiepunten. Zo missen de voorgestelde modellen een ‘basiswaarheid’ waarmee ze zijn te vergelijken. In plaats daarvan moeten de modellen het doen met de tweede beste optie in de vorm van het triangulatiemodel dat – zoals eerder gezien – de nodige beperkingen kent in vooral de niet vlakke wanden. Omdat dus bij voorbaat bekend is dat de uitkomsten van dit triangulatiemodel ook niet 100 procent juist zijn, zal het geen doel op zich zijn om te streven naar een verschil van nul tussen de resultaten van de voorgestelde modellen en die van het triangulatiemodel.
Verder hebben de voorgestelde modellen zelf ook hun beperkingen. Zo houden ze niet efficiënt rekening met de invloed van objecten op grotere afstanden, zoals bergen. Wanneer er wel rekening zou worden gehouden met dit type objecten, zou dit echter een significante verlenging van de pre-processing tijd betekenen. In het kader van dit onderzoek – dat zich richt op de stedelijke omgeving – is dit aspect van minder belang, maar over een mogelijke oplossing is wel nagedacht. Zo is het bijvoorbeeld mogelijk om het digitale oppervlakte model van de directe omgeving in een hoge resolutie te simuleren en de omgeving die zich verder weg bevindt in een lagere resolutie. Een andere beperking ligt in het feit dat het simulatieprogramma Daysim niet gelijktijdig meer sensoren kan doorrekenen omdat de geometrieën met elkaar interfereren. Dit betekent dat elke sensor apart moet worden doorgerekend waarbij vervolgens rekening moet worden gehouden met de overlap van de waarden. Softwarematig zijn hiervoor oplossingen te vinden.
Tavenier: ‘Ik denk dat de voorgestelde modellen uiteindelijk in meer situaties zijn te gebruiken dan alleen het voorspellen van de opbrengst van pv-systemen. Ik zie bijvoorbeeld mogelijkheden in het detecteren van fouten in pv-systemen gebaseerd op de elektrische output. Bovendien zijn de modellen in te zetten voor het modelleren van zogenaamde ‘zonlichtkaarten’ waarin de omgeving is meegenomen. Voordat de modellen echter daadwerkelijk kunnen worden geïmplementeerd in een complete pv-simulatieworkflow, zullen eerst de eerdergenoemde beperkingen moeten worden aangepakt. Daarbij moeten we rekening houden met het feit dat de simulatie op dit moment uitsluitend in Grasshopper draait hoewel dat is in principe eenvoudig is te converteren naar een andere (opensource) simulatieworkflow.
Toekomstig onderzoek
Eén van de belangrijkste thema’s dat nader onderzoek vraagt, is de reflectiewaarde van de gecreëerde geometrie. Tavenier: ‘Deze moet nauwkeuriger worden bepaald dan we nu doen, om ook een nauwkeuriger waarde van de prestaties van het pv-systeem te geven. Er is wat dat betreft een wiskundig albedo-model beschikbaar voor zonne-energie applicaties. Dit geeft het verband aan tussen de belangrijke parameters en de reflectie van de aarde als een functie van het gereflecteerde spectrum van een schaduwmodel in een 3D-omgeving. Dit zou een goed startpunt kunnen zijn om de reflectiewaarde te bepalen.’ Er is dan echter alsnog extra onderzoek nodig om de gemiddelde reflectiewaarden op macroschaal te verkrijgen. Tavenier: ‘Een van de mogelijkheden in dat kader, is te kijken naar het verband tussen zonnereflectie en de kleur van een materiaal zoals dit op een foto is te zien. Hiermee zijn eventueel reflectiewaarden voor gebouwen of delen van steden te genereren op basis van straatniveau-, orthogonale of satellietbeelden. Daarbij gebruik makend van een algoritme dat herkent of een (deel van) een object in de schaduw ligt op basis van licht en donker.’
‘Het toevoegen van deze gegevens aan de voorgestelde modellen zal leiden tot een verbetering van de nauwkeurigheid. Dit geldt overigens ook – hoewel in mindere mate – voor het nauwkeuriger rekening houden met begroeiing. Waar we dit nu zien als volledige schaduw kan begroeiing wel degelijk licht doorlaten en hiermee effect hebben op de hoeveelheid zonnestraling die het pv-systeem bereikt. Hiervoor is eventueel gebruik te maken van een bestaand model dat slechts weinig rekentijd vraagt en rekening houdt met de demping van zonlicht door vegetatie en sneeuw-bedekking.’
‘Met andere woorden: Er is nog voldoende te doen op dit vlak en wellicht levert deze informatie voldoende inspiratie voor een volgend afstudeerproject.’
Bronnen en verwijzingen
- Chatzipoulka C., Compagnon R., Kaempf J., Nikolopoulou M., ‘Sky view factor as predictor of solaravailability on building façades’, Solar Energy, 2018.
- Sönmez F., Ziar H., Isabella O., Zeman M.,’Fast and accurate ray-casting-based view factor estimationmethod for complex geometries’, Solar Energy Materials and Solar Cells, 2019.
- Alam N., Coors V., Zlatanova S., Oosterom P., ‘Resolution in photovoltaic potential computation’, isprs Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016.
Tekst: ir. Marjolein de Wit-Blok, freelance journaliste.
Fotografie: Industrie
Meer weten over innovatieve technieken en ontwikkelingen?
Meld u dan nu aan voor onze gratis nieuwsbrief.